画像センサーとロボットアームによる部品の向き調整&収納の省人化
こちらは、コンベアから搬送されてくる部品を、画像センサーとロボットアームを用いて向き調整をすることで、トレーに部品を自動的に整列収納させたプロセス改善事例です。
ここがポイント!
- コンベア上の画像センサーとロボットアームを連携させることで、自動的に向き調整!
- トレーへの部品収納を自動化!
Before
- 部品の供給
- 部品の向き調整
- トレーに収納
- 搬送
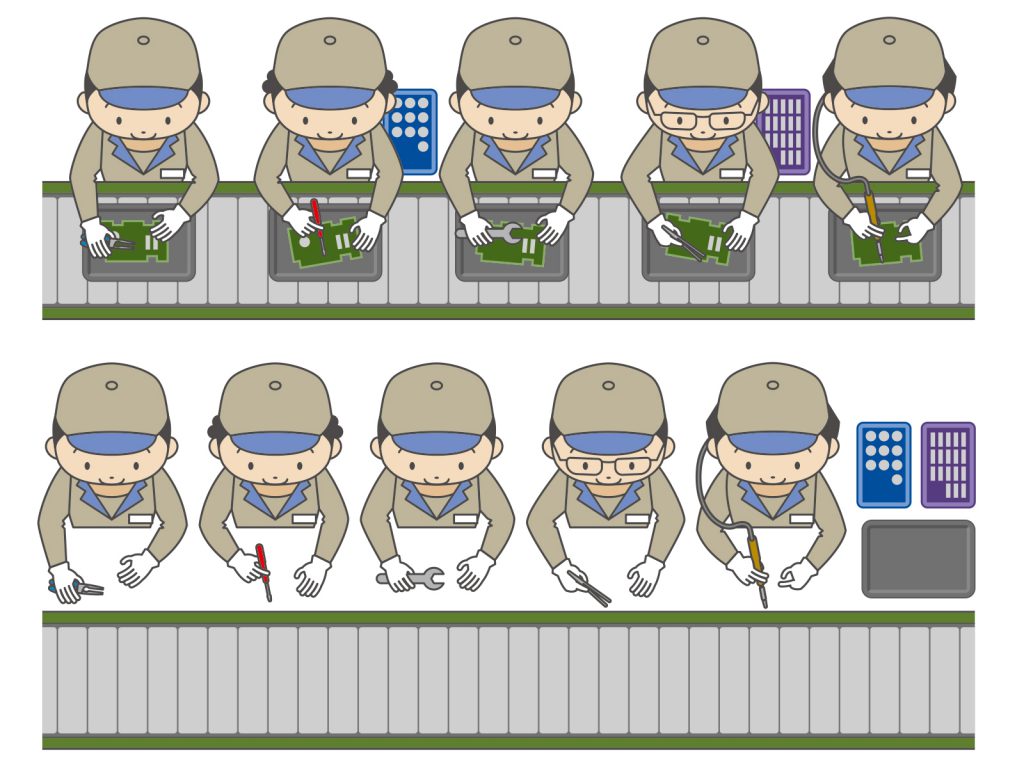
改善前は、コンベアから流れてくる部品を作業者の方々が目視で向きを確認し、向きを揃えてからトレーに収納して搬送する、というラインでした。
しかし部品も手のひらサイズのものであるため、また人の目視の場合は向きの判別に誤りが生じてしまう可能性もあり、不良品流出の防止とラインの効率化を図るために、ロボットによる自動化を検討されていました。
After
- 部品の供給
- 搬送
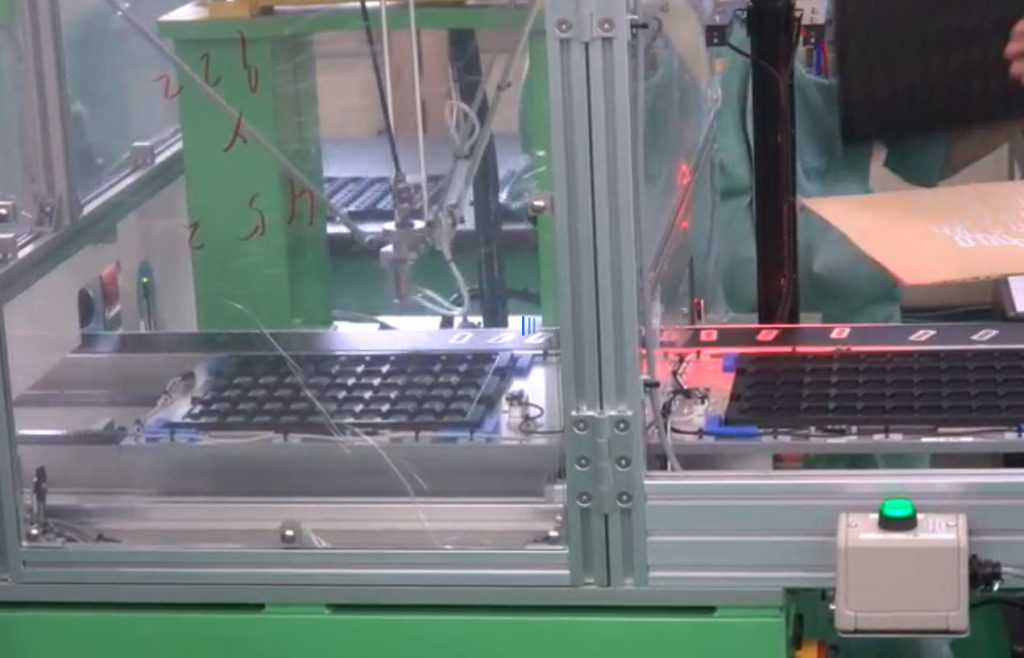
そこで工場無人化ナビでは、画像センサーとロボットアームによって部品のトレー収納工程を省人化する提案をいたしました。
コンベア上に画像センサーを搭載して、部品がコンベア上を流れている間に部品の向きを判別します。そして部品がロボットアーム周辺まで流れると、画像センサーの情報をもとにロボットアームが部品の向きを調整しつつ、高速で部品をトレーに収納していきます。
これによって、人の作業工程は部品の供給およびトレー自体の搬送のみになり、ラインの省人化に成功いたしました。